
Undervandsrobot skal udforske Jupiters måne
Et enkelt dansk hold er sluppet igennem nåleøjet til VM i design af undervandsrobotter, som i næste uge afholdes på NASAs hovedkvarter i Huston. Robotten kan søge efter muligt liv på Jupiters måne, Europa.

Det er seks ingeniørstuderende fra Aarhus Universitet, der i næste uge skal repræsentere Danmark i den prestigefyldte verdenskonkurrence med den teknologisk avancerede undervandsrobot TOSCE.
Den er blevet skabt i laboratoriet over flere år og er nu klar til at dyste imod den resterende verdenselite af robotter.
Konkurrencens slutrunde afvikles i næste uge på NASAs hovedkvarter i Huston, hvor i alt blot 39 ud af mere end 600 hold fra hele verden er udtaget på baggrund af tekniske rapporter og videodokumentation.
”Mange af de andre deltagere er fra prestigefyldte universiteter. De har enorme budgetter og op til 20-30 studerende på projektet. Vi er seks mand og et lille budget, men til gengæld har vi fundet frem til en ret unik løsning omkring robottens manøvreringssystem, som jeg vil mene, giver os en reel vinderchance,” siger Lasse Thorfinn Jagd, ingeniørstuderende, Aarhus Universitet.
De vindende hold får en samarbejdskontrakt med NASA og skal derefter deltage aktivt i arbejdet med at bygge en undervandsrobot til historiens første planlagte mission til Jupiters måne Europa i 2022.
Det ydre tæller i rummet
Europa er dækket af is, og under isen formoder forskere, at der er et hav af saltvand. NASAs 2022-mission skal undersøge, om der er liv i havet ved at sende en undervandsrobot ned igennem den tykke is.
Derfor skal robotten til konkurrencen demonstrere, at den kan løse en række specifikke opgaver. Blandt andet skal den kunne fragte udstyr, tage prøver, fotografere points-of-interest og bygge en sensorstation under vand. Den skal også kunne måle temperatur og tryk med henblik på at kortlægge isens tykkelse og identificere eventuelle undervandsvulkaner.
Samtidig skal robotten være både let og smal. Den må veje maksimalt 17 kilo og have en længde på maksimalt 58 cm på den længste diagonal af hensyn til de meget store brændstofudgifter og aerodynamiske principper, der er forbundet med at sende den på rumfart.
Og netop disse ydre ”skønhedskriterier” er en af de helt store ingeniørmæssige udfordringer, forklarer Peter Blæsild Danielsen, ingeniørstuderende, Aarhus Universitet:
”Det er en ekstremt avanceret dimensioneringsopgave at udstyre robotten med værktøjer til at klare alle opgaverne uden at den bliver tung. Vi har brugt mange resurser på topologioptimering for at finde et perfekt match mellem robottens kræfter, dens vægt og omfang samt dens evne til at bevæge sig og bremse præcist.”
Otte motorer og en hemmelig algoritme giver vinderchancer
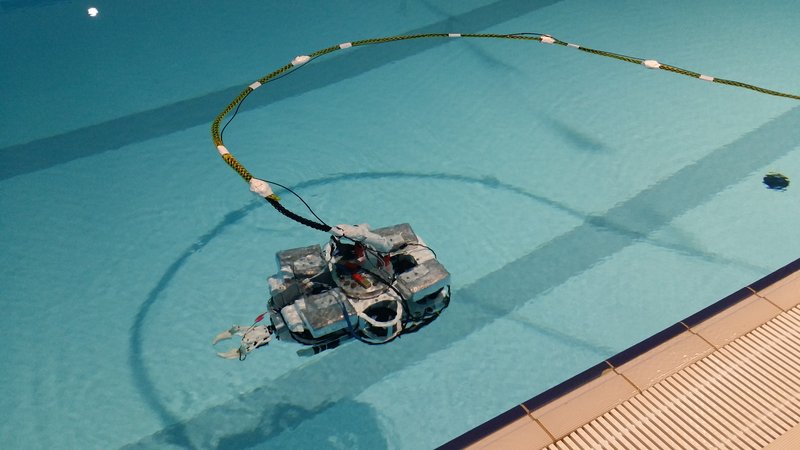
Den danske undervandsrobot har form som en mindre kuffert i letvægtsmaterialer med otte propelmotorer placeret i en nøje beregnet vinkel for at sikre fuld manøvredygtighed i alle retninger.
Den er udstyret med 3D-printede arme med multifunktionsgribere samt et avanceret rotationssystem, der gør det muligt for den at udføre motorisk krævende opgaver med stor præcision. Den har også fået monteret et sæt stereokameraøjne, som giver den dybdesyn under vand og dermed optimale muligheder for at afstandsbedømme.
Sidst, men ikke mindst, har de studerende udviklet en algoritme som meget vel kan bringe dem frem i vinderfeltet:
”Robotten er selvstabiliserende under vand, og det gør den helt unik. Det betyder, at den kan placere sig I fast position på trods af bølger og undervandsstrømme. Den kan også holde den samme vinkel i fremdriften, selv hvis den har tung last eller meget modstrøm, og det giver den enestående navigationsegenskaber og dermed også gode vinderchancer,” siger Claus Melvad, som er adjunkt ved Aarhus Universitet og har mange års erfaring med udvikling af undervandsrobotter.
Forberedt til rumeventyr
Undervandsrobotten skal gennemføre i alt 17 opgaver i løbet af konkurrencedagene i et gigantisk testbassin med 28 millioner liter vand. Selv om det ikke helt svarer til forholdene på Europa, så er det en god test for det eventuelle videre udviklingssamarbejde med NASA.
”Det er klart, at hvis robotten skal ud i rummet, så skal den bygges af materialer, der kan klare meget større trykbelastning, og den skal enten kunne fjernstyres fra jorden eller fungere autonomt. Men vores idéer, beregninger og teknologiske principper er de samme,” siger Lasse Thorfinn Jagd.